Bipolární krokový motor
Konstrukce
Modul LED diod
LCD displej
7.segmentový displej
Maticový displej
Maticová klávesnice
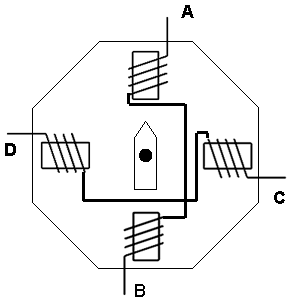
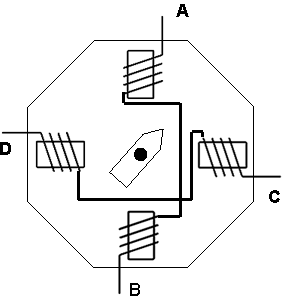
Toto je pouze principielní schéma, protože by motor byl schopen na jednu otočku udělat pouze 4 kroky po 90°. Ve skutečnosti je tam cívek mnohem více a jsou vzájemně propojeny. Rotor tvoří permanentní magnet, který se otáčí k té cívce, kterou prochází proud správným směrem. Šipka směřuje k severnímu pólu magnetu!!
K řízení tohoto krokového motoru můžeme použít 3 způsoby:
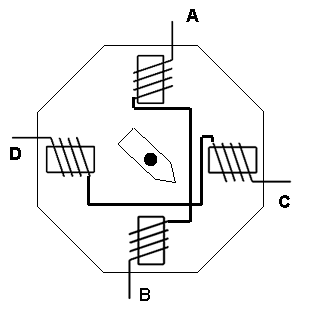
a) řízení s jednou sepnutou fází - proud prochází pouze jedním vinutím
b) řízení se dvěma sepnutými fázemi - proud prochází oběmi vinutími současně
c) řízení s polovičním krokem - kombinace obou předešlých způsobů
Pro další popis budeme předpokládat, že pozice rotoru na obrázku je výchozí ( 0° ) a že vývod A je připojen na vývod P1.0, B na P1.1, C na P1.2 a D na P1.3.
Také je důležité vědět, že natočení do určité pozice lze udělat pouze ze sousední pozice, takže pořadí stavů na cívkách musí být zachováno ( můžeme změnit pouze směr ).
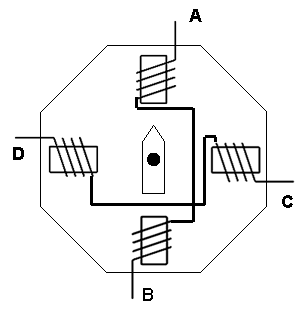 |
P1 - xxxx1110 proud protéká z A do B |
 |
P1 - xxxx1011 proud protéká z C do D |
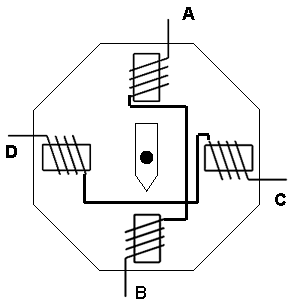 |
P1 - xxxx1101 proud protéká z B do A |
 |
P1 - xxxx0111 proud protéká z D do C |
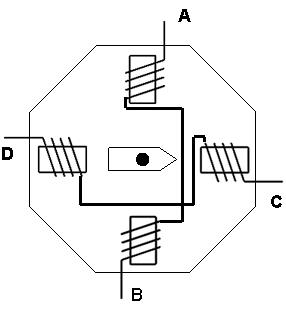
Řízení se dvěma sepnutými fázemi
Protože proud prochází oběmi cívkami je magnet rotoru natočen mezi ně.
 |
P1 - xxxx1010 proud prochází z A do B a z C do D |
 |
P1 - xxxx1001 proud prochází z B do A a z C do D |
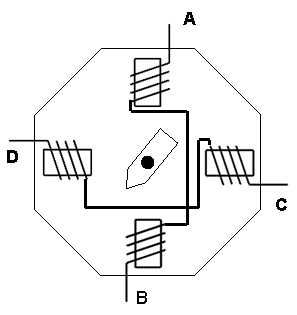 |
P1 - xxxx0101 proud prochází z B do A a z D do C |
 |
P1 - xxxx0110 proud prochází z A do B a z D do C |
Tento způsob umožňuje dělat kroky po polovičním úhlu. Je to
složení dvou předchozích způsobů, jejichž jednotlivé kroky se střídají.
Následuje ukázkový program dvoufázového řízení.Motor se směrem doleva nastaví
na 0° ,pak provede 20 kroků doprava a vypne se.V následujícím programu se využívá
zapojení krokového motoru na výukovém modulu, kde je zapojena na bit portu Px.6
světelná závora, která při dosažení výchozí pozice tento bit nuluje a k bitu
portu Px.7 zapnutí/vypnutí motoru (Px.7=0 vypnuto, Px.7=1 zapnuto).
;**************************************************
;******************Motor na P1*********************
;*nastavi nula stupnu, provede 20 kroku a vypne se*
;***autor: miloslav siroky, vytvoreno 27.02.2006***
;**************************************************
|
port pz ps ;************** ;************** nastav: ;************** toc: start: zac: ;************** start1: skok: ;************** stop: ;************** pauza: smy: ;************** pauza1: smy1: ;************** tab1: ;************** tab2: ;************** |
equ bit bit ************** org ************** mov jmp ************** mov mov mov mov movc mov call inc cjne djnz jmp ************** mov mov movc mov call inc jnb cjne jmp ************** clr jmp ************** mov mov djnz djnz ret ************** mov mov djnz djnz ret ************** db db db db ************** db db db db ************** end |
p1 p1.6 p1.7 ************** 00h ************** dptr,#tab2 start1 ************** dptr,#tab1 r7,#5 r0,#0 a,r0 a,@a+dptr port,a pauza1 r0 r0,#4,zac r7,start stop ************** r0,#0 a,r0 a,@a+dptr port,a pauza r0 pz,toc r0,#4,skok start1 ************** ps $ ************** r1,#50 r2,#250 r2,$ r1,smy ************** r1,#255 r2,#255 r2,$ r1,smy1 ************** 11111010b 11110110b 11110101b 11111001b ************** 11110101b 11110110b 11111010b 11111001b ************** |
;pojmenovani portu ;pojmenovani bitu zavory ;pojmenovani bitu vypnuti ************** ;nastaveni pocatku ************** ;nacteni tabulky 2 ;skok na smycku nastaveni 0° ************** ;nacteni tabulky 1 ;zapis poctu behu smycky ;nulovani citace radku tabulky ;zapis hodnoty citace do a ;zapis bajtu z tabulky do a ;zapis bajtu z a na port ;cekani s hodnotou na portu ;navyseni hodnoty citace ;kontrola nacteni vsech radku tabulky ;kontrola poctu probehnuti smycky ;skok na stop ************** ;smycka pro nastaveni 0° ;kontrola zavory na 0° ;skok na smycku otaceni ************** ;vypnuti motoru nulovanim bitu ps ;nekonecna smycka ************** ;zpozdeni pro rychle otoceni do 0° ************** ;zpozdeni pro pomale krokovani ************** ;tabulka pro otaceni doprava ************** ;tabulka pro otaceni doleva ************** ;konec programu |